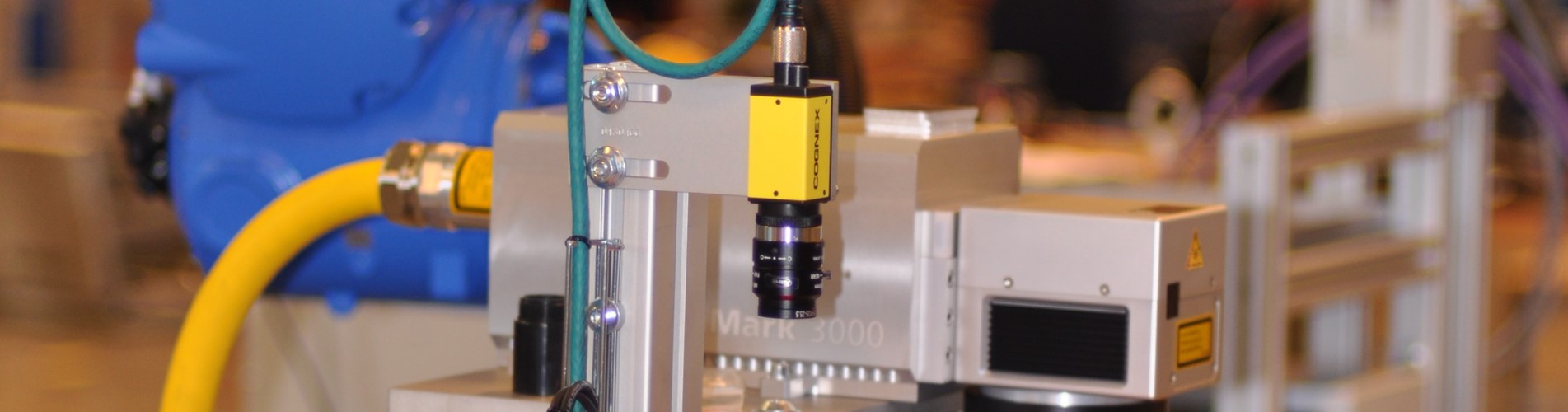
Vision systems
Vision technique and cameras are used for many different tasks for machines. From verification of marking to control of product quality. Production of faulty products is secured by ensuring quality early in the process. Vision is utilised ever more frequently for guiding robots. Applications vary from machine tending, assembly applications and to guiding of specific movements.
We use both smart cameras and checkers as well as full scale PC based vision systems. When several cameras are required, a PC based vision system is preferred as this often reduces the overall cost.
For one off applications, smart cameras or simpler checkers can be favored.
When choosing the most suitable camera solution and objectives to use, the requirements for resolution and speed need to be evaluated. The resolution affects how exact the system must be and also the field of view and amount of data required to manage the images. Then the appropriate type of lighting is chosen. The lighting is critical and very important in having a stable application. We use many different light sources, from LED and IR to laser lighting and combined with different filters.
For some applications 3d vision is used. By passing the product through the line laser a number of images are created and these build up a 3d image. The 3d image can be used to identify defects, control measurements or for positioning.
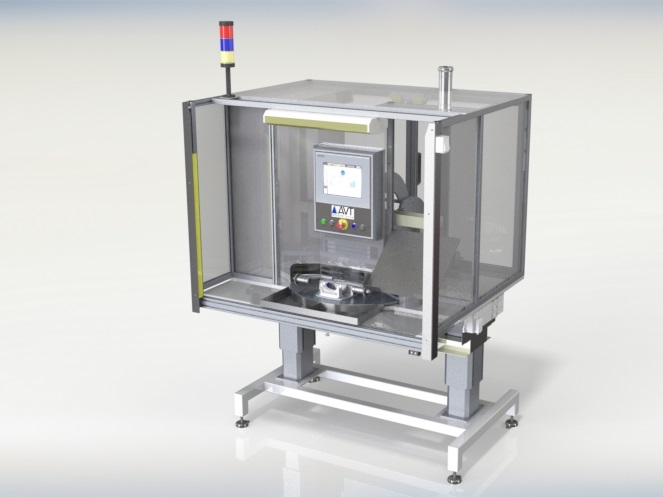
In our lab we perform pre-studies and tests for your applications and evaluate the most suitable technology and solution.
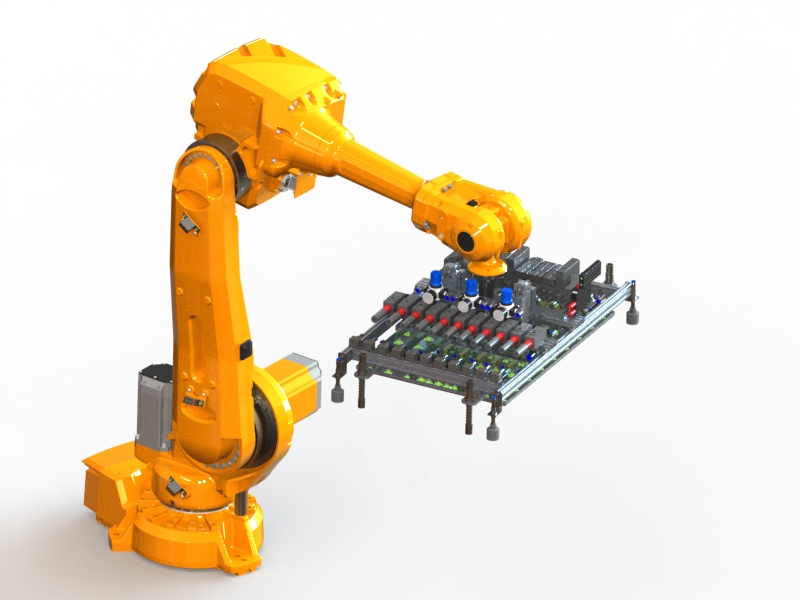
Robot vision
En typical application used with high volumes is to feed products on a conveyor under a camera. The conveyor is connected to a encoder that measures how far the conveyor has moved since the image was taken. The image is analysed by software and the pick position for one or more parts is sent to a robot, the robot then picks the parts while in movement from the conveyor.
One or more robots can be placed after each other and pick products from the conveyor. An ABB Flexpicker robot is commonly used with high volumes as it has a picking speed cycle of 0,5 seconds. By utilising a vision system, a robot can pick and mange different variants more easily and changeover between products is simpler.
We propose the most suitable feeding method for your production and we are not restricted by specific technology.
Typical applications
· Reading of 2d codes, OCR, Data matrix, marked text, marking quality, traceability and database input.
· Control of product quality, such as detecting material defects, damage, etc. on critical surfaces and areas.
· Control of dimensions and measurements, ejection of faulty parts.
· Control that parts are assembled correctly and that all required parts are present before EOL delivery.
· Guiding of robot, identification and positioning of parts for robot picking. Identification of hole position or similar connection point where the robot is to assemble a part.
· Picking with a robot from a pallet or conveyor.
· Picking from flexifeeder back lit picking area.
· Picking a part in motion from a conveyor.
· Measurement of parts.
We have various solutions to secure the quality of your production and improve traceability, so contact us for more information.
AVT Industriteknik design, manufacture and deliver advanced turnkey automated production solutions. Intelligent and effective!



Passion for Production
Rating
Contact us
Industrigatan 1
441 38 Alingsås
Hantverksvägen 14
436 33 Askim
Tel: 0322-64 25 00
2026 © AVT Industriteknik AB. All Rights Reserved.